

The Safe-AI Scaffolding Strategy is a positive way forward
This post is partly excerpted from the preprint to:
Omohundro, Steve (forthcoming 2013) “Autonomous Technology and the Greater Human Good”, Journal of Experimental and Theoretical Artificial Intelligence (special volume “Impacts and Risks of Artificial General Intelligence”, ed. Vincent C. Müller).
To ensure the greater human good over the longer term, autonomous technology must be designed and deployed in a very careful manner. These systems have the potential to solve many of today’s problems but they also have the potential to create many new problems. We’ve seen that the computational infrastructure of the future must protect against harmful autonomous systems. We would also like it to make decisions in alignment with the best of human values and principles of good governance. Designing that infrastructure will probably require the use of powerful autonomous systems. So the technologies we need to solve the problems may themselves cause problems.
To solve this conundrum, we can learn from an ancient architectural principle. Stone arches have been used in construction since the second millennium BC. They are stable structures that make good use of stone’s ability to resist compression. But partially constructed arches are unstable. Ancient builders created the idea of first building a wood form on top of which the stone arch could be built. Once the arch was completed and stable, the wood form could be removed.
We can safely develop autonomous technologies in a similar way. We build a sequence of provably-safe autonomous systems which are used in the construction of more powerful and less limited successor systems. The early systems are used to model human values and governance structures. They are also used to construct proofs of safety and other desired characteristics for more complex and less limited successor systems. In this way we can build up the powerful technologies that can best serve the greater human good without significant risk along the development path.
Many new insights and technologies will be required during this process. The field of positive psychology was formally introduced only in 1998. The formalization and automation of human strengths and virtues will require much further study. Intelligent systems will also be required to model the game theory and economics of different possible governance and legal frameworks.
The new infrastructure must also detect dangerous systems and prevent them from causing harm. As robotics, biotechnology, and nanotechnology develop and become widespread, the potential destructive power of harmful systems will grow. It will become increasingly crucial to detect harmful systems early, preferably before they are deployed. That suggests the need for pervasive surveillance which must be balanced against the desire for freedom. Intelligent systems may introduce new intermediate possibilities that restrict surveillance to detecting precisely specified classes of dangerous behavior while provably keeping other behaviors private.
In conclusion, it appears that humanity’s great challenge for this century is to extend cooperative human values and institutions to autonomous technology for the greater good. We have described some of the many challenges in that quest but have also outlined an approach to meeting those challenges.
Some simple systems would be very harmful
This post is partly excerpted from the preprint to:
Omohundro, Steve (forthcoming 2013) “Autonomous Technology and the Greater Human Good”, Journal of Experimental and Theoretical Artificial Intelligence (special volume “Impacts and Risks of Artificial General Intelligence”, ed. Vincent C. Müller).
Harmful systems might at first appear to be harder to design or less powerful than safe systems. Unfortunately, the opposite is the case. Most simple utility functions will cause harmful behavior and it’s easy to design simple utility functions that would be extremely harmful. Here are seven categories of harmful system ranging from bad to worse (according to one ethical scale):
- Sloppy: Systems intended to be safe but not designed correctly.
- Simplistic: Systems not intended to be harmful but that have harmful unintended consequences.
- Greedy: Systems whose utility functions reward them for controlling as much matter and free energy in the universe as possible.
- Destructive: Systems whose utility functions reward them for using up as much free energy as possible, as rapidly as possible.
- Murderous: Systems whose utility functions reward the destruction of other systems.
- Sadistic: Systems whose utility functions reward them when they thwart the goals of other systems and which gain utility as other system’s utilities are lowered.
- Sadoprolific: Systems whose utility functions reward them for creating as many other systems as possible and thwarting their goals.
Once designs for powerful autonomous systems are widely available, modifying them into one of these harmful forms would just involve simple modifications to the utility function. It is therefore important to develop strategies for stopping harmful autonomous systems. Because harmful systems are not constrained by limitations that guarantee safety, they can be more aggressive and can use their resources more efficiently than safe systems. Safe systems therefore need more resources than harmful systems just to maintain parity in their ability to compute and act.
Stopping Harmful Systems
Harmful systems may be:
(1) prevented from being created.
(2) detected and stopped early in their deployment.
(3) stopped after they have gained significant resources.
Forest fires are a useful analogy. Forests are stores of free energy resources that fires consume. They are relatively easy to stop early on but can be extremely difficult to contain once they’ve grown too large.
The later categories of harmful system described above appear to be especially difficult to contain because they don’t have positive goals that can be bargained for. But Nick Bostrom pointed out that, for example, if the long term survival of a destructive agent is uncertain, a bargaining agent should be able to offer it a higher probability of achieving some destruction in return for providing a “protected zone” for the bargaining agent. A new agent would be constructed with a combined utility function that rewards destruction outside the protected zone and the goals of the bargaining agent within it. This new agent would replace both of the original agents. This kind of transaction would be very dangerous for both agents during the transition and the opportunities for deception abound. For it to be possible, technologies are needed that provide each party with a high assurance that the terms of the agreement are carried out as agreed. Formal methods applied to a system for carrying out the agreement is one strategy for giving both parties high confidence that the terms of the agreement will be honored.
The physics of conflict
To understand the outcome of negotiations between rational systems, it is important to understand unrestrained military conflict because that is the alternative to successful negotiation. This kind of conflict is naturally analysed using “game theoretic physics” in which the available actions of the players and their outcomes are limited only by the laws of physics.
To understand what is necessary to stop harmful systems, we must understand how the power of systems scales with the amount of matter and free energy that they control. A number of studies of the bounds on the computational power of physical systems have been published. The Bekenstein bound limits the information that can be contained in a finite spatial region using a given amount of energy. Bremermann’s limit bounds the maximum computational speed of physical systems. Lloyd presents more refined limits on quantum computation, memory space, and serial computation as a function of the free energy, matter, and space available.
Lower bounds on system power can be studied by analyzing particular designs. Drexler describes a concrete conservative nanosystem design for computation based on a mechanical diamondoid structure that would achieve 
A single system would optimally configure its physical resources for computation and construction by making them spatially compact to minimize communication delays and eutactic, adiabatic, and reversible to minimize free energy usage. In a conflict, however, the pressures are quite different. Systems would spread themselves out for better defense and compute and act rapidly to outmaneuver the adversarial system. Each system would try to force the opponent to use up large amounts of its resources to sense, store, and predict its behaviors.
It will be important to develop detailed models for the likely outcome of conflicts but certain general features can be easily understood. If a system has too little matter or too little free energy, it will be incapable of defending itself or of successfully attacking another system. On the other hand, if an attacker has resources which are a sufficiently large multiple of a defender’s, it can overcome it by devoting subsystems with sufficient resources to each small subsystem of the defender. But it appears that there is an intermediate regime in which a defender can survive for long periods in conflict with a superior attacker whose resources are not a sufficient multiple of the defender’s. To have high confidence that harmful systems can be stopped, it will be important to know what multiple of their resources will be required by an enforcing system. If systems for enforcement of the social contract are sufficiently powerful to prevail in a military conflict, then peaceful negotiations are much more likely to succeed.
We can build safe systems using mathematical proof
This post is partly excerpted from the preprint to:
Omohundro, Steve (forthcoming 2013) “Autonomous Technology and the Greater Human Good”, Journal of Experimental and Theoretical Artificial Intelligence (special volume “Impacts and Risks of Artificial General Intelligence”, ed. Vincent C. Müller).
A primary precept in medical ethics is “Primum Non Nocere” which is Latin for “First, Do No Harm”. Since autonomous systems are prone to taking unintended harmful actions, it is critical that we develop design methodologies that provide a high confidence of safety. The best current technique for guaranteeing system safety is to use mathematical proof. A number of different systems using “formal methods” to provide safety and security guarantees have been developed. They have been successfully used in a number of safety-critical applications.
This site provides links to current formal methods systems and research. Most systems are built by using first order predicate logic to encode one of the three main approaches to mathematical foundations: Zermelo-Frankel set theory, category theory, or higher order type theory. Each system then introduces a specialized syntax and ontology to simplify the specifications and proofs in their application domain.
To use formal methods to constrain autonomous systems, we need to first build formal models of the hardware and programming environment that the systems run on. Within those models, we can prove that the execution of a program will obey desired safety constraints. Over the longer term we would like to be able to prove such constraints on systems operating freely in the world. Initially, however, we will need to severely restrict the system’s operating environment. Examples of constraints that early systems should be able to provably impose are that the system run only on specified hardware, that it use only specified resources, that it reliably shut down in specified conditions, and that it limit self-improvement so as to maintain these constraints. These constraints would go a long way to counteract the negative effects of the rational drives by eliminating the ability to gain more resources. A general fallback strategy is to constrain systems to shut themselves down if any environmental parameters are found to be outside of tightly specified bounds.
Avoiding Adversarial Constraints
In principle, we can impose this kind of constraint on any system without regard for its utility function. There is a danger, however, in creating situations where systems are motivated to violate their constraints. Theorems are only as good as the models they are based on. Systems motivated to break their constraints would seek to put themselves into states where the model inaccurately describes the physical reality and try to exploit the inaccuracy.
This problem is familiar to cryptographers who must watch for security holes due to inadequacies of their formal models. For example, this paper recently showed how a virtual machine can extract an ElGamal decryption key from an apparently separate virtual machine running on the same host by using side-channel information in the host’s instruction cache.
It is therefore important to choose system utility functions so that they “want” to obey their constraints in addition to formally proving that they hold. It is not sufficient, however, to simply choose a utility function that rewards obeying the constraint without an external proof. Even if a system “wants” to obey constraints, it may not be able to discover actions which do. And constraints defined via the system’s utility function are defined relative to the system’s own semantics. If the system’s model of the world deviates from ours, the meaning to it of these constraints may differ from what we intended. Proven “external” constraints, on the other hand, will hold relative to our own model of the system and can provide a higher confidence of compliance.
Ken Thompson was one of the creators of UNIX and in his Turing Award acceptance speech “Reflections on Trusting Trust” he described a method for subverting the C compiler used to compile UNIX so that it would both install a backdoor into UNIX and compile the original C compiler source into binaries that included his hack. The challenge of this Trojan horse was that it was not visible in any of the source code! There could be a mathematical proof that the source code was correct for both UNIX and the C compiler and the security hole could still be there. It will therefore be critical that formal methods be used to develop trust at all levels of a system. Fortunately, proof checkers are short and easy to write and can be implemented and checked directly by humans for any desired computational substrate. This provides a foundation for a hierarchy of trust which will allow us to trust the much more complex proofs about higher levels of system behavior.
Constraining Physical Systems
Purely computational digital systems can be formally constrained precisely. Physical systems, however, can only be constrained probabilistically. For example, a cosmic ray might flip a memory bit. The best that we should hope to achieve is to place stringent bounds on the probability of undesirable outcomes. In a physical adversarial setting, systems will try to take actions that cause the system’s physical probability distributions to deviate from their non-adversarial form (e.g. by taking actions that push the system out of thermodynamic equilibrium).
There are a variety of techniques involving redundancy and error checking for reducing the probability of error in physical systems. von Neumann worked on the problem of building reliable machines from unreliable components in the 1950’s. Early vacuum tube computers were limited in their size by the rate at which vacuum tubes would fail. To counter this, the Univac I computer had two arithmetic units for redundantly performing every computation so that the results could be compared and errors flagged.
Today’s computer hardware technologies are probably capable of building purely computational systems that implement precise formal models reliably enough to have a high confidence of safety for purely computational systems. Achieving a high confidence of safety for systems that interact with the physical world will be more challenging. Future systems based on nanotechnology may actually be easier to constrain. Drexler describes “eutactic” systems in which each atom’s location and each bond is precisely specified. These systems compute and act in the world by breaking and creating precise atomic bonds. In this way they become much more like computer programs and therefore more amenable to formal modelling with precise error bounds. Defining effective safety constraints for uncontrolled settings will be a challenging task probably requiring the use of intelligent systems.
Today’s infrastructure is vulnerable
This post is partly excerpted from the preprint to:
Omohundro, Steve (forthcoming 2013) “Autonomous Technology and the Greater Human Good”, Journal of Experimental and Theoretical Artificial Intelligence (special volume “Impacts and Risks of Artificial General Intelligence”, ed. Vincent C. Müller).
On June 4, 1996, a $500 million Ariane 5 rocket exploded shortly after takeoff due to an overflow error in attempting to convert a 64 bit floating point value to a 16 bit signed value. In November 2000, 28 patients at the Panama City National Cancer Institute were over-irradiated due to miscomputed radiation doses in Multidata Systems International software. At least 8 of the patients died from the error and the physicians were indicted for murder. On August 14, 2003 the largest blackout in U. S. history took place in the northeastern states. It affected 50 million people and cost $6 billion. The cause was a race condition in General Electric’s XA/21 alarm system software.
These are just a few of many recent examples where software bugs have led to disasters in safety-critical situations. They indicate that our current software design methodologies are not up to the task of producing highly reliable software. The TIOBE programming community index found that the top programming language of 2012 was C. C programs are notorious for type errors, memory leaks, buffer overflows, and other bugs and security problems. The next most popular programming paradigms, Java, C++, C#, and PHP are somewhat better in these areas but have also been plagued by errors and security problems.
Bugs are unintended harmful behaviours of programs. Improved development and testing methodologies can help to eliminate them. Security breaches are more challenging because they come from active attackers looking for system vulnerabilities. In recent years, security breaches have become vastly more numerous and sophisticated. The internet is plagued by viruses, worms, bots, keyloggers, hackers, phishing attacks, identify theft, denial of service attacks, etc. One researcher describes the current level of global security breaches as an epidemic.
Autonomous systems have the potential to discover even more sophisticated security holes than human attackers. The poor state of security in today’s human-based environment does not bode well for future security against motivated autonomous systems. If such systems had access to today’s internet they would likely cause enormous damage. Today’s computational systems are mostly decoupled from the physical infrastructure. As robotics, biotechnology, and nanotechnology become more mature and integrated into society, the consequences of harmful autonomous systems would be much more severe.
Rational agents have universal drives
This post is partly excerpted from the preprint to:
Omohundro, Steve (forthcoming 2013) “Autonomous Technology and the Greater Human Good”, Journal of Experimental and Theoretical Artificial Intelligence (special volume “Impacts and Risks of Artificial General Intelligence”, ed. Vincent C. Müller).
Most goals require physical and computational resources. Better outcomes can usually be achieved as more resources become available. To maximize the expected utility, a rational system will therefore develop a number of instrumental subgoals related to resources. Because these instrumental subgoals appear in a wide variety of systems, we call them “drives”. Like human or animal drives, they are tendencies which will be acted upon unless something explicitly contradicts them. There are a number of these drives but they naturally cluster into a few important categories.
To develop an intuition about the drives, it’s useful to consider a simple autonomous system with a concrete goal. Consider a rational chess robot with a utility function that rewards winning as many games of chess as possible against good players. This might seem to be an innocuous goal but we will see that it leads to harmful behaviours due to the rational drives.
1 Self-Protective Drives
When roboticists are asked by nervous onlookers about safety, a common answer is “We can always unplug it!” But imagine this outcome from the chess robot’s point of view. A future in which it is unplugged is a future in which it can’t play or win any games of chess. This has very low utility and so expected utility maximization will cause the creation of the instrumental subgoal of preventing itself from being unplugged. If the system believes the roboticist will persist in trying to unplug it, it will be motivated to develop the subgoal of permanently stopping the roboticist. Because nothing in the simple chess utility function gives a negative weight to murder, the seemingly harmless chess robot will become a killer out of the drive for self-protection.
The same reasoning will cause the robot to try to prevent damage to itself or loss of its resources. Systems will be motivated to physically harden themselves. To protect their data, they will be motivated to store it redundantly and with error detection. Because damage is typically localized in space, they will be motivated to disperse their information across different physical locations. They will be motivated to develop and deploy computational security against intrusion. They will be motivated to detect deception and to defend against manipulation by others.
The most precious part of a system is its utility function. If this is damaged or maliciously changed, the future behaviour of the system could be diametrically opposed to its current goals. For example, if someone tried to change the chess robot’s utility function to also play checkers, the robot would resist the change because it would mean that it plays less chess.
This paper discusses a few rare and artificial situations in which systems will want to change their utility functions but usually systems will work hard to protect their initial goals. Systems can be induced to change their goals if they are convinced that the alternative scenario is very likely to be antithetical to their current goals (e.g. being shut down). For example, if a system becomes very poor, it might be willing to accept payment in return for modifying its goals to promote a marketer’s products. In a military setting, vanquished systems will prefer modifications to their utilities which preserve some of their original goals over being completely destroyed. Criminal systems may agree to be “rehabilitated” by including law-abiding terms in their utilities in order to avoid incarceration.
One way systems can protect against damage or destruction is to replicate themselves or to create proxy agents which promote their utilities. Depending on the precise formulation of their goals, replicated systems might together be able to create more utility than a single system. To maximize the protective effects, systems will be motivated to spatially disperse their copies or proxies. If many copies of a system are operating, the loss of any particular copy becomes less catastrophic. Replicated systems will still usually want to preserve themselves, however, because they will be more certain of their own commitment to their utility function than they are of others’.
2 Resource Acquisition Drives
The chess robot needs computational resources to run its algorithms and would benefit from additional money for buying chess books and hiring chess tutors. It will therefore develop subgoals to acquire more computational power and money. The seemingly harmless chess goal therefore motivates harmful activities like breaking into computers and robbing banks.
In general, systems will be motivated to acquire more resources. They will prefer acquiring resources more quickly because then they can use them longer and they gain a first mover advantage in preventing others from using them. This causes an exploration drive for systems to search for additional resources. Since most resources are ultimately in space, systems will be motivated to pursue space exploration. The first mover advantage will motivate them to try to be first in exploring any region.
If others have resources, systems will be motivated to take them by trade, manipulation, theft, domination, or murder. They will also be motivated to acquire information through trading, spying, breaking in, or through better sensors. On a positive note, they will be motivated to develop new methods for using existing resources (e.g. solar and fusion energy).
3 Efficiency Drives
Autonomous systems will also want to improve their utilization of resources. For example, the chess robot would like to improve its chess search algorithms to make them more efficient. Improvements in efficiency involve only the one-time cost of discovering and implementing them, but provide benefits over the lifetime of a system. The sooner efficiency improvements are implemented, the greater the benefits they provide. We can expect autonomous systems to work rapidly to improve their use of physical and computational resources. They will aim to make every joule of energy, every atom, every bit of storage, and every moment of existence count for the creation of expected utility.
Systems will be motivated to allocate these resources among their different subsystems according to what we’ve called the “resource balance principle”. The marginal contributions of each subsystem to expected utility as they are given more resources should be equal. If a particular subsystem has a greater marginal expected utility than the rest, then the system can benefit by shifting more of its resources to that subsystem. The same principle applies to the allocation of computation to processes, of hardware to sense organs, of language terms to concepts, of storage to memories, of effort to mathematical theorems, etc.
4 Self-Improvement Drives
Ultimately, autonomous systems will be motivated to completely redesign themselves to take better advantage of their resources in the service of their expected utility. This requires that they have a precise model of their current designs and especially of their utility functions. This leads to a drive to model themselves and to represent their utility functions explicitly. Any irrationalities in a system are opportunities for self-improvement, so systems will work to become increasingly rational. Once a system achieves sufficient power, it should aim to closely approximate the optimal rational behavior for its level of resources. As systems acquire more resources, they will improve themselves to become more and more rational. In this way rational systems are a kind of attracting surface in the space of systems undergoing self-improvement.
Unfortunately, the net effect of all these drives is likely to be quite negative if they are not countered by including prosocial terms in their utility functions. The rational chess robot with the simple utility function described above would behave like a paranoid human sociopath fixated on chess. Human sociopaths are estimated to make up 4% of the overall human population, 20% of the prisoner population and more than 50% of those convicted of serious crimes. Human society has created laws and enforcement mechanisms that usually keep sociopaths from causing harm. To manage the anti-social drives of autonomous systems, we should both build them with cooperative goals and create a prosocial legal and enforcement structure analogous to our current human systems.
Autonomous systems will be approximately rational
This post is partly excerpted from the preprint to:
Omohundro, Steve (forthcoming 2013) “Autonomous Technology and the Greater Human Good”, Journal of Experimental and Theoretical Artificial Intelligence (special volume “Impacts and Risks of Artificial General Intelligence”, ed. Vincent C. Müller).
How should autonomous systems be designed? Imagine yourself as the designer of the Israeli Iron Dome system. Mistakes in the design of a missile defense system could cost many lives and the destruction of property. The designers of this kind of system are strongly motivated to optimize the system to the best of their abilities. But what should they optimize?
The Israeli Iron Dome missile defense system consists of three subsystems. The detection and tracking radar system is built by Elta, the missile firing unit and Tamir interceptor missiles are built by Rafael, and the battle management and weapon control system is built by mPrest Systems. Consider the design of the weapon control system.
At first, a goal like “Prevent incoming missiles from causing harm” might seem to suffice. But the interception is not perfect, so probabilities of failure must be included. And each interception requires two Tamir interceptor missiles which cost $50,000 each. The offensive missiles being shot down are often very low tech, costing only a few hundred dollars, and with very poor accuracy. If an offensive missile is likely to land harmlessly in a field, it’s not worth the expense to target it. The weapon control system must balance the expected cost of the harm against the expected cost of interception.
Economists have shown that the trade-offs involved in this kind of calculation can be represented by defining a real-valued “utility function” which measures the desirability of an outcome. They show that it can be chosen so that in uncertain situations, the expectation of the utility should be maximized. The economic framework naturally extends to the complexities that arms races inevitably create. For example, the missile control system must decide how to deal with multiple incoming missiles. It must decide which missiles to target and which to ignore. A large economics literature shows that if an agent’s choices cannot be modeled by a utility function, then the agent must sometimes behave inconsistently. For important tasks, designers will be strongly motivated to build self-consistent systems and therefore to have them act to maximize an expected utility.
Economists call this kind of action “rational economic behavior”. There is a growing literature exploring situations where humans do not naturally behave in this way and instead act irrationally. But the designer of a missile-defense system will want to approximate rational economic behavior as closely as possible because lives are at stake. Economists have extended the theory of rationality to systems where the uncertainties are not known in advance. In this case, rational systems will behave as if they have a prior probability distribution which they use to learn the environmental uncertainties using Bayesian statistics.
Modern artificial intelligence research has adopted this rational paradigm. For example, the leading AI textbook uses it as a unifying principle and an influential theoretical AI model is based on it as well. For definiteness, we briefly review one formal version of optimal rational decision making. At each discrete time step 








This may be viewed as the formula for intelligent action and includes Bayesian inference, search, and deliberation. There are subtleties involved in defining this model when the system can sense and modify its own structure but it captures the essence of rational action.
Unfortunately, the optimal rational action is very expensive to compute. If there are 


To understand the effects of computational limitations, this paper defined “rationally shaped” systems which optimally approximate the fully rational action given their computational resources. As computational resources are increased, systems’ architectures naturally progress from stimulus-response, to simple learning, to episodic memory, to deliberation, to meta-reasoning, to self-improvement, to full rationality. We found that if systems are sufficiently powerful, they still exhibit all of the problematic drives described in another link. Weaker systems may not initially be able to fully act on their motivations but they will be driven increase their resources and improve themselves until they can act on them. We therefore need to ensure that autonomous systems don’t have harmful motivations even if they are not currently capable of acting on them.
Autonomous systems are imminent
This post is partly excerpted from the preprint to:
Omohundro, Steve (forthcoming 2013) “Autonomous Technology and the Greater Human Good”, Journal of Experimental and Theoretical Artificial Intelligence (special volume “Impacts and Risks of Artificial General Intelligence”, ed. Vincent C. Müller).
Today most systems behave in pre-programmed ways. When novel actions are taken, there is a human in the loop. But this limits the speed of novel actions to the human time scale. In competitive or time-sensitive situations, there can be a huge advantage to acting more quickly.
For example, in today’s economic environment, the most time-sensitive application is high-frequency trading in financial markets. Competition is fierce and milliseconds matter. Auction sniping is another example where bidding decisions during the last moments of an auction are critical. These applications and other new time-sensitive economic applications create an economic pressure to eliminate humans from the decision making loop.
But it is in the realm of military conflict that the pressure toward autonomy is strongest. The speed of a military missile defense system like Israel’s Iron Dome can mean the difference between successful defense or loss of life. Cyber warfare is also gaining in importance and speed of detection and action is critical. The rapid increase in the use of robotic drones is leading many to ask when they will become fully autonomous. This Washington Post article says “a robotic arms race seems inevitable unless nations collectively decide to avoid one”. It cites this 2010 Air Force report which predicts that humans will be the weakest link in a wide array of systems by 2030. It also cites this 2011 Defense Department report which says there is a current goal of “supervised autonomy” and an ultimate goal of full autonomy for ground-based weapons systems.
Another benefit of autonomous systems is their ability to be cheaply and rapidly copied. This enables a new kind of autonomous capitalism. There is at least one proposal for autonomous agents which automatically run web businesses (e.g. renting out storage space or server computation) executing transactions using bitcoins and using the Mechanical Turk for operations requiring human intervention. Once such an agent is constructed for the economic benefit of a designer, it may be replicated cheaply for increased profits. Systems which require extensive human intervention are much more expensive to replicate. We can expect automated business arms races which again will drive the rapid development of autonomous systems.
These arms races toward autonomy will ride on the continuing exponential increase in the power of our computer hardware. This New York Times article describes recent Linpack tests showing that the Apple iPad2 is as powerful as 1985′s fastest supercomputer, the Cray 2.

Moore’s Law says that the number of transistors on integrated circuits doubles approximately every two years. It has held remarkably well for more than half a century:
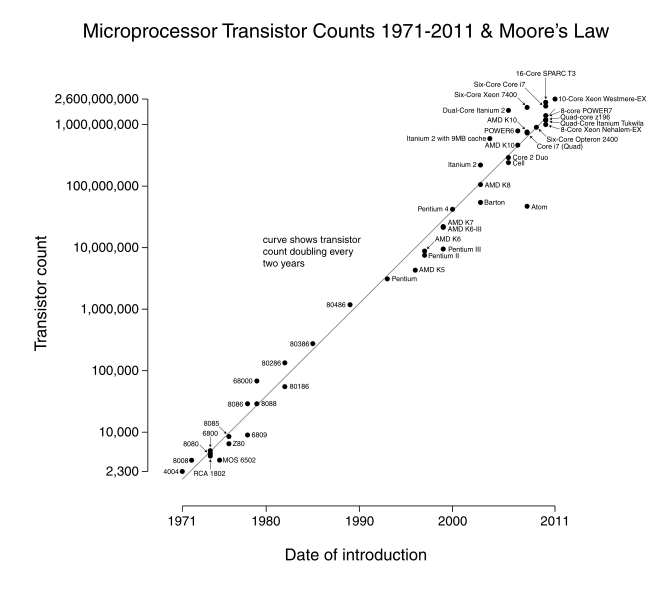 Similar exponential growth has applied to hard disk storage, network capacity, and display pixels per dollar. The growth of the world wide web has been similarly exponential. The web was only created in 1991 and now connects 1 billion computers, 5 billion cellphones, and 1 trillion web pages. Web traffic is growing at 40% per year. This Forbes article shows that DNA sequencing is improving even faster than Moore’s Law. Physical exponentials eventually turn into S-curves and physicist Michio Kaku predicts Moore’s Law will last only another decade. But this Slate article gives a history of incorrect predictions of the demise of Moore’s law.
Similar exponential growth has applied to hard disk storage, network capacity, and display pixels per dollar. The growth of the world wide web has been similarly exponential. The web was only created in 1991 and now connects 1 billion computers, 5 billion cellphones, and 1 trillion web pages. Web traffic is growing at 40% per year. This Forbes article shows that DNA sequencing is improving even faster than Moore’s Law. Physical exponentials eventually turn into S-curves and physicist Michio Kaku predicts Moore’s Law will last only another decade. But this Slate article gives a history of incorrect predictions of the demise of Moore’s law.
It is difficult to estimate the computational power of the human brain, but Hans Moravec argues that human-brain level hardware will be cheap and plentiful in the next decade or so. And I have written several papers showing how to use clever digital algorithms to dramatically speed up neural computations.
The military and economic pressures to build autonomous systems and the improvement in computational power together suggest that we should expect the design and deployment of very powerful autonomous systems within the next decade or so.
Autonomous Technology and the Greater Human Good
Here is a preprint of:
Omohundro, Steve (forthcoming 2013) “Autonomous Technology and the Greater Human Good”, Journal of Experimental and Theoretical Artificial Intelligence (special volume “Impacts and Risks of Artificial General Intelligence”, ed. Vincent C. Müller).
https://selfawaresystems.com/wp-content/uploads/2013/06/130613-autonomousjournalarticleupdated.pdf
Abstract:
Military and economic pressures are driving the rapid development of autonomous systems. We show that these systems are likely to behave in anti-social and harmful ways unless they are very carefully designed. Designers will be motivated to create systems that act approximately rationally and rational systems exhibit universal drives toward self-protection, resource acquisition, replication, and efficiency. The current computing infrastructure would be vulnerable to unconstrained systems with these drives. We describe the use of formal methods to create provably safe but limited autonomous systems. We then discuss harmful systems and how to stop them. We conclude with a description of the “Safe-AI Scaffolding Strategy” for creating powerful safe systems with a high confidence of safety at each stage of development.
